Die Lösung
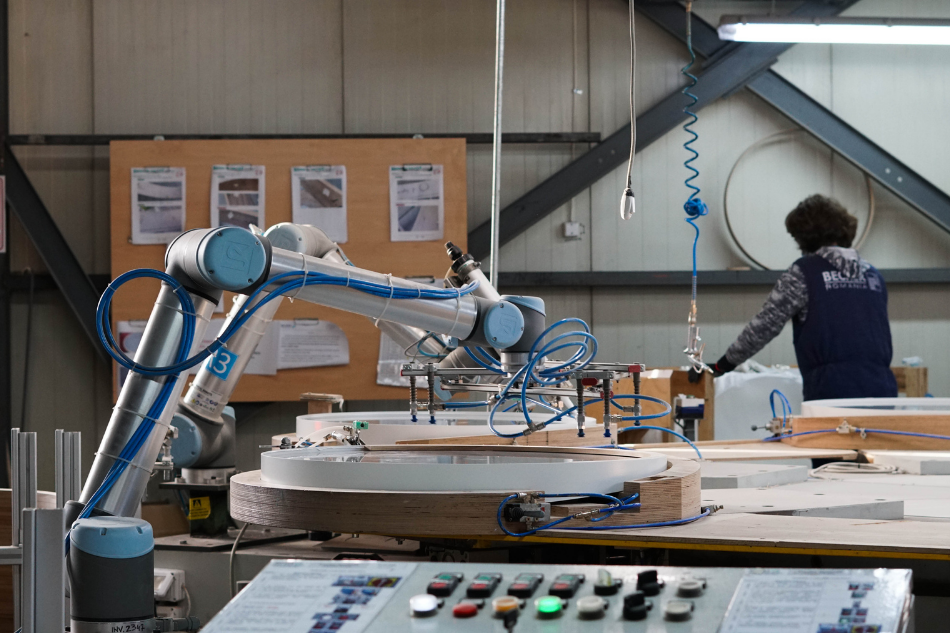
BECKER Romania entschied sich schließlich für den Einsatz zweier kollaborierender Roboter des Typs UR10 von Universal Robots, um den Prozess der Spiegelmontage zu automatisieren. Für die Montage arbeitet das menschliche Personal direkt mit den zwei Cobots zusammen. Die Mitarbeitenden fügen hierbei den Rahmen und das Glas zusammen und leeren das Karussell. Währenddessen übernehmen die zwei UR10-Roboter die Montage des Spiegels. Der erste Cobot trägt den Klebstoff mittels einer Klebepistole auf den Spiegelrahmen auf. Über einen intuitiv und flexibel bedienbaren Greifer mit Saugnäpfen nimmt der andere UR10 anschließend das zweite Teil, ein Ringsegment, von einer halbautomatischen Zuführeinheit auf und platziert es auf dem Klebstoff.
Die Programmierung der Cobots gestaltete sich völlig unkompliziert. Über die UR-Schnittstelle verwendete das Unternehmen dazu das vordefinierte Programm CircleMove. Auch weitere Schritte in der Montage werden automatisch über verschiedene Programme gesteuert: Muss beispielsweise der Klebstoff gewechselt werden, erhält einer der Angestellten die Information von einem speziellen Programm, das mit Hilfe einer globalen Variablen und einer Verbrauchsregel erstellt wurde. „Nach der Berechnung der Verbrauchsregel haben wir eine globale „Installationsvariable“ geschaffen, die auch nach Ausschalten des Roboters gespeichert bleibt. Indem wir sie zu Beginn jedes Programms überprüfen, zeigt uns die Variable an, ob der Klebstoff in der Tube leer ist. Wenn sie den Wert 0 erreicht, ruft das Programm ein Unterprogramm auf, das den Roboterarm in eine bestimmte Position bewegt. In dieser Position kann der Bediener den Klebstoff dann leicht wechseln“, erklärt Remus Țopan, technischer Ingenieur bei BECKER Romania. Auch der zweite Cobot mit dem Greifer ließ sich leicht programmieren, da mitunter die Sensoren in die Steuerbox des Roboters integriert wurden. Zur Erkennung des Rahmens nutzt er Näherungssensoren und zur Identifikation des Ringsegments im Lager fotoelektrische Sensoren. Die Verbindung zu den UR10-Cobots erfolgt mit Hilfe einer speicherprogrammierbaren Steuerung (SPS), die auch den Betrieb des Karussells steuert. Das gelingt mithilfe analoger Signale, die bidirektional übertragen werden.
Eine wichtige Rolle bei der erfolgreichen Integration der Cobots spielte auch der technische Support von Universal Robots. „Auf der UR-Website werden alle notwendigen Informationen bereitgestellt, sogar Sicherungsdateien für die entwickelten Programme und Dateien für Software-Updates. Der Support steht außerdem bei Bedarf mit Rat und Tat zur Seite“, erklärt Remus Țopan.
Der Einsatz der zwei Cobots bei BECKER Romania ist ein voller Erfolg: Sie ermöglichen dem Unternehmen die volle Kontrolle über wichtige Prozessschritte und sorgen für eine konsistente Produktqualität. Ein weiteres Plus ist die Flexibilität der Cobots, die bei Bedarf für andere Aufgaben genutzt werden können – ein Aspekt, den BECKER als klaren Wettbewerbsvorteil betrachtet. Der Möbelhersteller plant daher, künftig noch weitere Cobots einzusetzen: Ein UR16e-Roboter für das Bürsten von Oberflächen befindet sich bereits in der Testphase.